5/19 車のコントロール および 基礎の復習
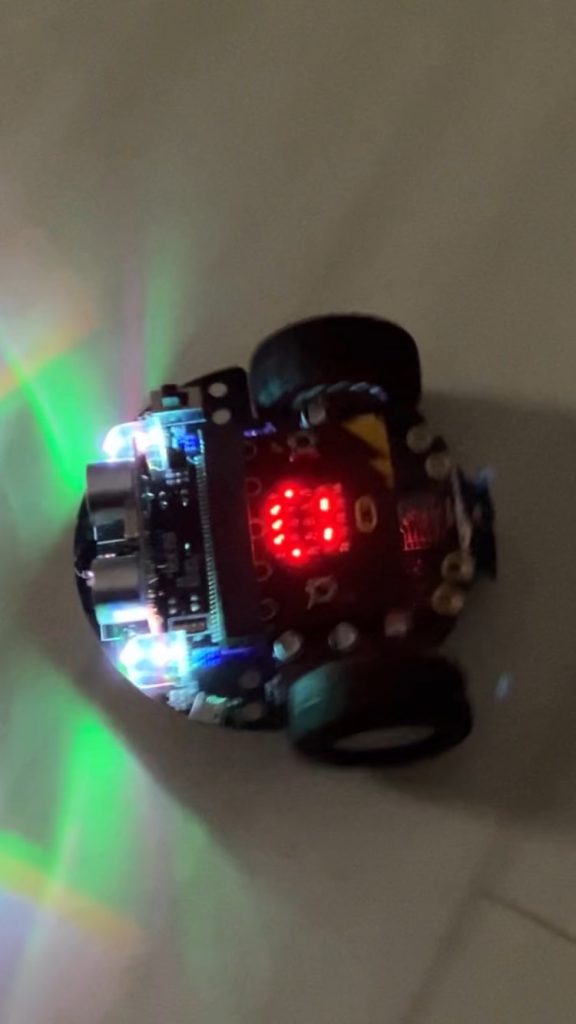
BLEで接続して、車とコントローラで 走行を制御するプログラムを作成した。
2つの「駆動タイヤ」のみで、方向を制御させるために、モーターの回転速度を左右で異なる値に設定し、左右を制御した。また、コントローラーから受信する信号の時間間隔に応じて、タイヤの駆動時間を 何ミリSecにすればよいかを実験しながら決めていった。
BLEで接続して、車とコントローラで 走行を制御するプログラムを作成した。
2つの「駆動タイヤ」のみで、方向を制御させるために、モーターの回転速度を左右で異なる値に設定し、左右を制御した。また、コントローラーから受信する信号の時間間隔に応じて、タイヤの駆動時間を 何ミリSecにすればよいかを実験しながら決めていった。